


Sjálfkeyrandi bílar og aðstoðarkerfi ökumannsins
Sigurður Svavar Indriðason sviðsstjóri bílgreinasviðs skrifar um stöðuga þróun öryggiskerfa og sjálfkeyrandi bíla.

Um miðja 20.öld var byrjað að vinna að því að bæta öryggi bifreiða þar sem mjög algengt var að þeir sem lentu í umferðarslysum hlytu mjög alvarlega áverka og þá sérstaklega höfuðáverka sem í mörgum tilfellum ullu dauða. Þegar sænski uppfinningarmaðurinn Nils Bohlin og Volvo kynntu til leiks þriggja punkta belti árið 1959 sem var staðalbúnaður, má segja að stórt skref hafi verið tekið hvað varðar öryggi enda sýndu rannsóknir á þeim tíma að beltin minnkuðu líkur á alvarlegum áverkum til muna og er einn stærsti öryggisþáttur bifreiða enn þann dag í dag.
Frá tilkomu þriggja punkta beltanna hafa framleiðendur lagt sífellt aukna áherslu á öryggi farþega og ýmiss annar öryggisbúnaður komið fram eins og t.d. loftpúðar og ABS hemlakerfi ásamt bættri hönnun burðavirkisins. En þó öryggiskerfi bifreiða séu nú mjög góð í að vernda farþega ef lent er í árekstri slasast enn margir og þá ekki eingöngu farþegar heldur eru gangandi vegfarendur stór hluti þeirra sem slasast í umferðaslysum.
Til að ná því markmiði að enginn látist í umferðinni sem sumir framleiðendur og lönd hafa sett sér þarf meira til. Framleiðendur hafa því á undanförnum árum verið að þróa og kynna til leiks öryggisbúnað sem á að reyna að koma í veg fyrir eða allavega minnka alvarleika umferðaslysa með því að sjá fyrir mögulegar hættulegar aðstæður og bregðast við með fyrirbyggjandi hætti áður en til áreksturs kemur.
Þessi öryggiskerfi eru kölluð ADAS kerfi (Advanced driver assistance systems) og er ætlað að aðstoða ökumann með viðvörunum eða jafnvel taka stjórn á bifreiðinni í stuttan tíma til að koma í veg fyrir árekstur. Þessi kerfi eru enn í stöðugri þróun og virka í mörgum tilfellum mjög vel við vissar aðstæður en eins og er ber ökumaður ávallt ábyrgð á akstrinum. Lokatakmarkið hjá mörgum framleiðendum er svo að bílarnir geti undir flestum kringumstæðum ekið sjálfir án aðkomu ökumanns.
Öryggiskerfin
Hlutverk ökumanns er í raun mjög flókið og krefst mikillar athygli, það er ekki nóg að kunna bara að stjórna bifreiðinni heldur þarf að fylgjast með öllu hinu sem er í gangi í umferðinni og bara það að keyra á ókunnum slóðum eins og t.d. erlendis getur ollið því að jafnvel mjög reyndir ökumenn verða óöruggir og gera mistök. Í raun má rekja yfirgnæfandi hluta umferðaslysa til mannlegra mistaka og skorts á athygli við akstur. Þessi öryggiskerfi eiga því að grípa inn í og aðstoða ökumanninn þegar aðstæður krefjast þess. Þau öryggiskerfi sem heyra til svokallaðra ADAS kerfa eru orðin mjög mörg og bera hinar ýmsu skammstafanir og því oft erfitt að átta sig á hvaða kerfi eru til staðar í hverjum bíl fyrir sig og hvernig þau virka. Einföldustu kerfin einungis aðvara ökumanninn sem þarf þá að bregðast við, dæmi um slík kerfi er t.d. FCW (forward collision warning ) og LDW (Lane departure warning) en þau aðvara ökumann ef hætta er á árekstri að framan eða að bíllinn sé að rása af akrein. Þróaðri útgáfur þessara kerfa hafa svo getu til að bregðast við án aðkomu ökumanns með því að taka stjórn á hemlum og/eða stýri. Dæmi um slík kerfi væri þá árekstravari eða FCA (Forward collision avoidance ) og akreinavari eða LKA (Lane keeping assist). Kerfin eru því að mörgu leyti byggð á sömu grunnvirkni og nota sömu skynjara og grunnkerfin en geta bílsins til að skilja aðstæður, túlka þau gögn sem fyrir eru og bregðast við á réttan hátt verður alltaf betri og betri og til þess þarf mjög öflugar tölvur. Sum kerfin má segja að séu á margan hátt líka að auka þægindi ökumanns samhliða því að bæta öryggi og dæmi um slík kerfi eru t.d. skynrænn hraðastillir eða ACC/SCC (Adaptive/smart cruse control ) sem aðlagar hraða bílsins að bílnum fyrir framan og PA (Parking assist) sem aðstoðar ökumann við að leggja í stæði, og eins sjálfvirk aðlögun háuljósa eða HBA (High beam assist) sem slekkur og kveikir sjálfkrafa á háageislanum ef bílar koma á móti sem getur verið mjög þægilegt. Þau kerfi sem nefnd hafa verið eru aðeins brot þeirra kerfa sem fyrir eru í mörgum nýjum bílum í dag og ef ætti að fara ítarlega yfir þau öll yrði þessi pistill töluvert lengri en hér að neðan verða nefnd nokkur kerfi sem ekki hafa verið nefnd:
- Blindpunktaviðvörun
- Blindpunkta myndavélar
- Bakk/360° myndavélar
- Árekstravörn fyrir gangandi vegfarendur og hjól
- Sjálfvirkur lestur umferðaskilta
- Hraðbrautaaðstoð (eins og t.d. Autopilot Tesla)
- Umferðateppu aðstoð (Traffic jam assist)
Skynjarar
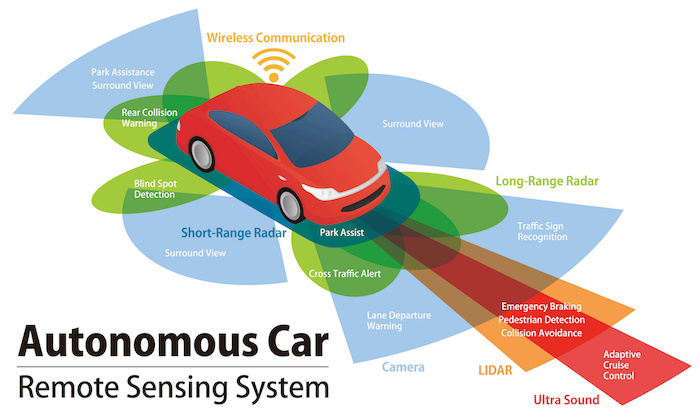
Eins og komið hefur fram byggjast þessi öryggiskerfi á því að bíllinn geti metið hvað sé að gerast í umhverfi þeirra.Við mannfólkið notum aðallega augun og að einhverju leyti eyrun til að meta umhverfi okkar þegar við keyrum en bíllinn notar hina ýmsu skynjara sem í sameiningu gefa tölvu bílsins þau gögn sem hún notar til að draga upp einfalda mynd af umhverfinu og bregðast við þeim aðstæðum sem fyrir eru. Bílar í dag eru búnir mörgum mismunandi skynjurum því enginn einn getur gefið allar þær upplýsingar sem til þarf, allir skynjarar hafa sína sérstöðu og takmörk. Dæmi um helstu skynjara í dag eru t.d. myndavélar í framrúðu(1 eða fleiri), radar (short,mid og long range), bakkmyndavél, blindpunktamyndavél, ultrasonic skynjari og jafnvel LIDAR sem svipar til radars en notar laser í stað örbylgja.
Eins og fyrr segir hafa allir þessir skynjarar ákveðna sérstöðu, myndavélar henta vel til myndgreiningar eins og að tracka hluti og fólk, radarinn gefur upplýsingar um vegalengd og hraða og LIDAR getur gefið þrívíddar kort af umhverfinu. Þessir skynjarar eru grundvallaratroði í því að kerfið bregðist við á réttan hátt og því mikilvægt að þeir sem þurfa mögulega að eiga við þessa skynjara vegna tjóns eða bilunar hafi þekkingu á þessum kerfum. Í mörgum tilfellum þarf að kvarða skynjarana aftur svo þeir virki eins og til var ætlast og þarf þá oft að notast við sérstakan kvörðunarbúnað. Ef ekki er farið rétt að í þessum málum getur komið upp sú staða að kerfin bregðist seint og/eða illa við hættulegum aðstæðum og skapað því aukna áhættu fyrir ökumann.
Sjálfkeyrandi bílar
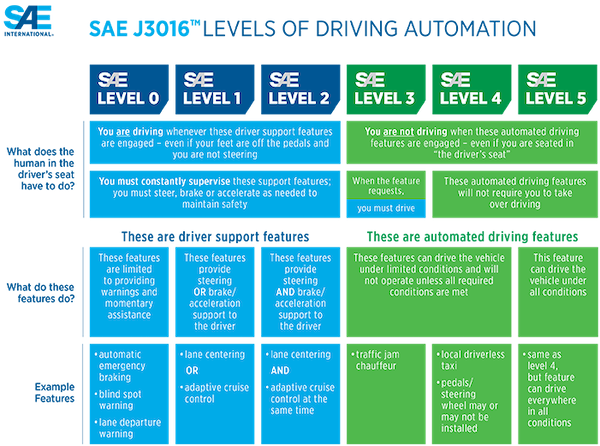
Eftir því sem kerfunum fjölgar og þau sameinuð í stærri kerfi ásamt því að minni þörf er á viðbrögðum ökumanns eykst sjálfvirknivæðing bílsins en hún er skilgreind samkvæmt SAE International staðlinum J3016 með 6 þrepum þar sem þrep 0 er engin sjálfvirknivæðing og þrep 5 er algjörlega sjálfkeyrandi eins og sjá má á myndinni hér að neðan. Í dag eru flestir nýir bílar á þrepi 1 eða 2 en þar sem kerfin eru einungis til aðstoðar og ökumenn bera fulla ábyrgð á akstrinum en á undanförnum árum hafa framleiðendur verið að fikra sig nær þrepum 3 og 4 með tilraunaútgáfum af bílum eða hugbúnaði t.d. Google, Tesla og Volvo.
Gallinn er sá að stökkið frá þrepi 2 yfir í þrep 3 eða 4 er stórt þar sem ökumaðurinn er ekki lengur ábyrgur fyrir akstrinum þar sem bíllinn sér um aksturinn og jafnvel er ekki lengur stýribúnaður til staðar og því þarf að vera hægt að treysta þessum búnaði bílsins 100% og eins koma inn ýmis lagaleg mál hvað varðar ábyrgð ef eitthvað kemur upp og í mörgum löndum væru slíkir bílar í raun ólöglegir eins og lög og reglur eru í dag.
Eins spilar traust fólksins til þessara bíla og búnaðar miklu. Því bendir margt til þess að þó það megi búast við mikilli þróun í tengslum við þessi kerfi á komandi árum og kerfi á þrepi 2 verði mjög fullkomin og teygi sig jafnvel aðeins inn á þrep 3 verði líklegast nokkur bið í að við getum farið að leggja okkur eða lesa bók í morgunumferðinni en sá tími mun koma.


